FOV equations
The FOV of an inspection system comprising of a camera and lens is a function of:
- The size of the imager that is in the camera
- The focal length of the lens
- The working distance (WD)
The dimensions of the FOV are usually known to the system designer. Often this is simply the minimum width, height or diagonal of the sample that is to be imaged (typically adding a little buffer space around the sample).
The desired working distance may be constrained by certain aspects of the inspection setup or workflow – for example, if there is a minimum clearance needed between the sample and the lens. As described in another Knowledge Base article, lens manufacturers specify a minimum working distance (sometimes referred to as Minimum Object Distance) above which the lens is capable of forming a focused image.
At the outset, the imager size and the focal length of the lens are not typically known, and the system designer must select a combination that meets the goal. If the camera is selected based on its “photonics” and/or its frame rate characteristics, the imager size is known, and only the focal length of the lens remains to be estimated, based on the working distance and the desired FOV.
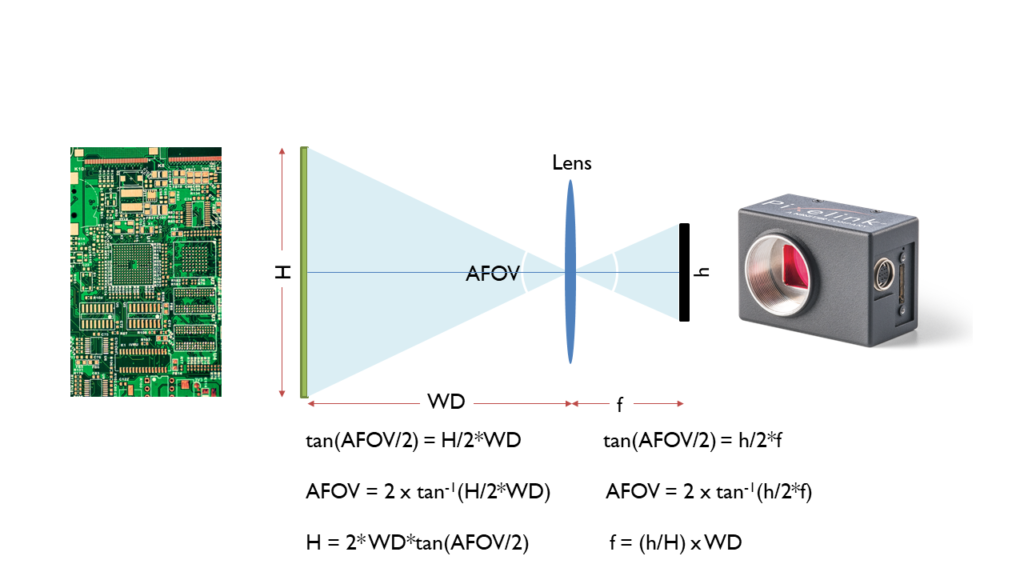
In the above equations FOV, AFOV and imager dimensions are represented as parameters in the horizontal orientation. Similar sets of equations are valid for vertical or diagonal parameters. For many lenses, the diagonal AFOV is published by the lens manufacturer (as in our lens table). Therefore, it is convenient to estimate diagonal dimensions and then scale the results in proportion to the aspect ratios to determine H x V dimensions.
An estimate for minimum feature size is often available, usually in terms of the smallest feature that must be resolvable in the sample plane. This must be verified at the final step of the selection process, keeping in mind that optical resolution can be limited by the lens or the pixel-size of the camera.
The table shown below is an example of how one may estimate the performance of camera and lens combinations.
| Camera P/N [Image Sensor], Interface | 1.1" format | #H pixels | #V pixels | Pixel size (μm) | H size (mm) | V size (mm) | Diagonal (mm) |
|---|---|---|---|---|---|---|---|
| PL-D797 [Sony IMX428], USB3.0 | 7MP@51f/sec | 3208 | 2200 | 4.5 | 14.44 | 9.90 | 17.5 |
| PL-D757 (HDR) [Sony IMX420], USB3.0 | 7MP@60f/sec | In applications that require the best achievable optical resolution, it is desirable to use a lens with an optical resolution ≥ 111 lp/mm for an image sensor with a pixel size of 4.5μm. This will ensure that the optical resolution of the camera & lens combination is Nyquist-limited by the pixel-size of the camera, and not by the quality of the lens. | |||||
| PL-X957 (HDR) [Sony IMX420], 10GigE | 7MP@112f/sec | ||||||
| wdt_ID | Compatible Lenses | NMV-6M1.1 | NMV-8M1.1 | NMV-12M1.1 | NMV-16M1.1 | NMV-25M1.1 | NMV-35M1.1 | NMV-50M1.1 |
|---|---|---|---|---|---|---|---|---|
| 1 | Optical Resolution: Center | Edge (lp/mm) | 160 | 100 | 160 | 100 | 160 | 100 | 160 | 100 | 160 | 100 | 160 | 100 | 160 | 100 |
| 2 | (*) Does lens meet Nyquist criteria? | yes | yes | yes | yes | yes | yes | yes |
| 3 | Focal Length (mm) | 6.5 | 8.5 | 12 | 16 | 25 | 35 | 50 |
| 4 | AFOV (°) | 109.1 | 91.2 | 71 | 58.3 | 38.8 | 27.5 | 20 |
| 5 | Minimum WD (mm) | 100 | 100 | 100 | 100 | 100 | 200 | 200 |
| 6 | Magnification | 0.07 | 0.09 | 0.12 | 0.16 | 0.25 | 0.17 | 0.25 |
| 7 | Diag FOV (mm) @ min. WD | 281 | 204 | 143 | 112 | 70 | 98 | 71 |
| 8 | H FOV (mm) @ min. WD | 232 | 169 | 118 | 92 | 58 | 81 | 58 |
| 9 | VFOV (mm) @ min. WD | 159 | 116 | 81 | 63 | 40 | 55 | 40 |
| 10 | (**) Min. resolvable feature size (mm) | 0.14 | 0.11 | 0.08 | 0.06 | 0.04 | 0.05 | 0.04 |
| 11 | #pixels that represent a 1mm feature | 14 | 19 | 27 | 36 | 56 | 39 | 56 |
| Notes: |
|---|
| The working distance (WD) is defined as the distance from the object plane to the front of the lens. |
| The above are theoretical estimates provided for reference, and are not a guarantee of performance. Actual FOVs and optical resolution are best determined by experiment. |
| FOV dimensions and min. resolvable feature sizes are estimated with the object plane placed at the minimum WD of the lens. A similar calculation may be performed for longer WDs. Please contact us for assistance: our specialists can help you identify a lens that meets your FOV requirements at a Working Distance that is convenient for your workflow. |
| Increasing the WD will result in larger FOVs, and lower optical resolution (an increase in the smallest resolvable feature size). |
| (*) The system meets Nyquist criteria if the optical resolution at the center of the lens (in lp/mm) is ≥ the pixel-size limited resolution (see above). |
| (**) The minimum resolvable feature size is estimated based on whether the lens meets the Nyquist criterion. If the Nyquist limit is met, then the resolution of the system is the estimated to be the distance on the sample plane that corresponds to two pixels in the image plane. If not, it is estimated based on the limiting resolution of the lens. |
| The method used in the above table is detailed in the linked knowledge base article titled "Choosing a Lens to meet FOV and WD requirements" |
